When I was a little kid, I didn't think about becoming a designer or an architect per-say, it's true I liked those things, but I had a love of something else, that remains to this day, and that love was ROBOTS! Yes, robots, or at least the idea of them was a basis for much of my creative exploits. I thought I could become an engineer one day, tinker around, and build super cool robots. Sadly I found my lack of math skills, and the realization that the career of an engineer is more cubicle drone than
mad scientist. This lead me to look in to animatronics and the film industry, which eventually lead to my theater degree. Although I never quite built a robot more sophisticated than a mouse bot through
FSEA, I have managed several R.O.V.s, aka remote operated vehicles over the years. My most recent one was Ankle
Biter, which I started 4 years ago and only recently start working on again. The project was something I always wanted to do, your standard tank like robot with a mechanical arm. Well, I haven't ever got to the arm, but I did get the tank part up and running. The first goal was to create an effective and affordable tank track, which I managed to do out of a cut up bike tire and V-belt. I first trimmed off the side wall of the bike tire. I then set up a jig to hold the V-belt center on the inside of the bike tire. Using a
drill press I drilled a hole through both every inch or so. I then used pop rivets to join the two together.
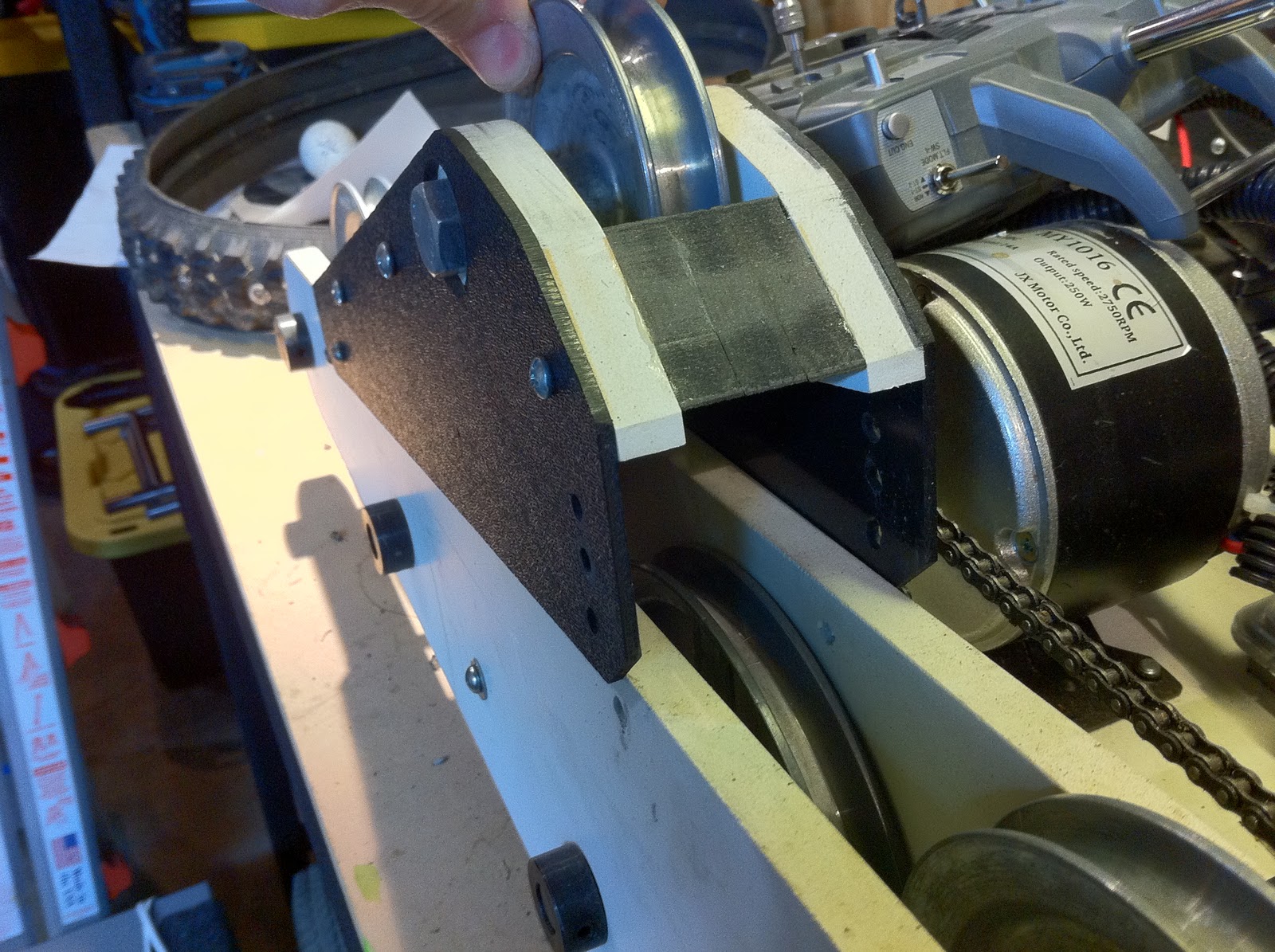
The pulley housing and body for the R.O.V. was made from 1/2" expanded PVC. Although it wasn't the best material to use given its weight, it was affordable and easy to work with. I made several mock ups of V-belt pulley arrangements to find the one that best suited the project. Once decided I used 1/2" steel rod as axle points with out bearings to save on costs. Seeing this project as a prototype of something better to come, I wasn't too worried about the longevity of the whole thing.
I used two
scooter motors, a
Sabertooth 2x25 speed controller, a Hitec optic 6 radio controller and two 12 volt lead acid batteries. I've had occasional issues with signal loss and the ROV going a little haywire, "this is why I've called it ankle biter." With the batteries in series running the thing at 24 volts, combined with the center of gravity too high the thing would flip over each time it came to a halt. It wasn't until I cut out a hole for the batteries and lowered them in to the body that the thing could run at max speed with out flipping over.
You can find more videos
here.
With all my other projects going on, I'm not sure when I'll get to work on Ankle Biter again. When I do, I look forward to completely rebuilding it, lighter, better, and STRONGER!! (10% chance this'll actually happen.)













You sir, are the MAN!
ReplyDelete